با گسترش سیستمهای مینیاتوری، لیدار به سمت حضور در همه کاربردها پیش میرود
از آنجایی که لیدار به عنوان ابزاری جهت تعیین مسافت و تشخیص نور، از نظر اندازه کوچک شده است (از مقیاس آزمایشگاهی و رومیزی تا سیستمهای به اندازه تراشه) میتواند در کاربردهای بیشماری مورد استفاده قرار بگیرد.
تشخیص نور و فاصله یابی[۱] (LIDAR) تکنولوژی ارزشمندی است که برای دستیابی به پارامترهایی مانند مسافت و شکل سه بعدی اجسام، ارزیابی های محیطی و جغرافیایی، کنترل زیرساختهای خطوط لوله و تجهیزات شبکه برق، نقشه برداری ساختاری و معماری، اکتشافات باستان شناسی و اقیانوس شناسی، بهینه سازی توربینهای بادی و کاربردهای بیشمار دیگر بکار میرود. چندی است که سیستمهای لیدار در مقیاس آزمایشگاهی یا رومیزی به سادگی بر روی یا داخل وسایل نقلیه و هواپیماها نصب میشوند. در حال حاضر سیستمهای مینیاتوری و یا حتی در اندازه تراشه، این قابلیت را به لیدار میدهند تا با وسایل نقلیه هوایی بدون سرنشین (UAV) یا هواپیماهای بدون خلبان، روباتهای صنعتی/زمینی کوچک و احتمالاً به زودی در تلفنهای هوشمند شخصی همراه شوند؛ این امر سبب میشود که لیدار در همه کاربردها حضور داشته باشد.
با وجود طیف سنج های مینیاتوری، دوربینهای مخفی و همچنین توسعه قطعات سازگار با تلفنهای هوشمند، و به مدد مونتاژهای اپتومکانیکی، منبع نور و پیشرفتهای تکمیلی، سیستمهای لیدار از نظر اندازه و قیمت در حال کاهش هستند.
مکانیک مینیاتور سازی
با وجود سیستمهای لیدار در اندازه های رومیزی و قیمتهای ده ها هزار دلاری که اطلاعاتی با تفکیک پذیری بالا را در فاصله های دور ارائه میدهند، استفاده گسترده از سیستمهای لیدار معمول برای کاربردهای تجاری و نظامی محدود شده است. آژانس پروژه تحقیقاتی پیشرفته دفاعی[۲] (DARPA؛ شهر آرلینگتون، VA) تکنولوژی نزدیک برد با میدان دید گسترده و بسیار سریع الانتقال که از نظر الکترونیکی با فرستنده فوتونیکی هدایت میشود ([۳]SWEEPER) و تکنولوژی اسکن اپتیکی غیرمکانیکی را برروی یک میکروچیپ گردآوری میکند را توسعه داده است [۱].
بدون استفاده از مانتهای نگهدارنده بزرگ، کند و حساس به فشار و دما، لنزها و سرووها[۴]، تکنولوژی سوئیپر[۵] میتواند باریکه لیزر را بیش از ۱۰۰۰۰۰ بار یا ۱۰۰۰۰ بار در ثانیه سریعتر از سیستمهای مکانیکی پیشرفته رایج، به عقب و جلو حرکت دهد. بعلاوه این تکنولوژی باریکه لیزر را حول یک قوس ۵۱ درجه هدایت میکند، که به گفته دارپا، این گسترده ترین میدان دیدی است که تاکنون از طریق یک سیستم اسکن اپتیکی در مقیاس چیپ بدست آمده است.
در اصل سوئیپر از تکنولوژی آرایه فازی اپتیکی استفاده میکند که در آن سطوح مهندسی شده جهت سیگنالهای الکترومغناطیسی انتخاب شده را با تغییر فاز در سرتاسر تعداد زیادی آنتن کوچک کنترل میکنند. در فرکانسهای اپتیکی، از آنجایی که طول موج های نور هزاران بار کوچکتر از طول موج هایی است که در رادار استفاده میشوند، اجزای آرایه آنتنها باید تنها در فاصله چند میکرونی از یکدیگر جا داده شوند بطوریکه اختلالات ساختاری یا محیطی، حتی در حد ۱۰۰ نانومتر، موجب تضعیف این آرایه نشوند.
با وجود اینکه سوئیپر عمل هدایت باریکه اپتیکی را از نظر ابعاد کوچک میکند، اما برای اینکه یک سیستم لیدار اسکنی بر پایه چیپ تولید شود قطعات بسیار بیشتری مورد نیاز است. برای دستیابی به این امر، هدف برنامه مجتمع سازی قطعات ناهمگن الکترونیکی و فوتونیکی [۶]E-PHI دارپا، استفاده از فرآیندهای ساخت نیمه رسانای استاندارد (که مشکلات عدم تطابق شبکه ای را برطرف میکند) برای ترکیب آنتنها، تقویت کننده های نوری، مدولاتورها، آشکارسازها و حتی یک منبع نوری بسیار کوچک است که توسط محققین دانشگاه کالیفرنیا، سانتا باربارا (UCSB) توسعه یافته است. این کار از طریق رشد لایه ایندیوم آرسناید به صورت نقطه های کوانتومی برای تشکیل یک سیستم لیدار کامل صورت گرفته است (شکل۱) [۲].
از آنجایی که لیدار به عنوان ابزاری جهت تعیین مسافت و تشخیص نور، از نظر اندازه کوچک شده است (از مقیاس آزمایشگاهی و رومیزی تا سیستمهای به اندازه تراشه) میتواند در کاربردهای بیشماری مورد استفاده قرار بگیرد.
تشخیص نور و فاصله یابی[۱] (LIDAR) تکنولوژی ارزشمندی است که برای دستیابی به پارامترهایی مانند مسافت و شکل سه بعدی اجسام، ارزیابی های محیطی و جغرافیایی، کنترل زیرساختهای خطوط لوله و تجهیزات شبکه برق، نقشه برداری ساختاری و معماری، اکتشافات باستان شناسی و اقیانوس شناسی، بهینه سازی توربینهای بادی و کاربردهای بیشمار دیگر بکار میرود. چندی است که سیستمهای لیدار در مقیاس آزمایشگاهی یا رومیزی به سادگی بر روی یا داخل وسایل نقلیه و هواپیماها نصب میشوند. در حال حاضر سیستمهای مینیاتوری و یا حتی در اندازه تراشه، این قابلیت را به لیدار میدهند تا با وسایل نقلیه هوایی بدون سرنشین (UAV) یا هواپیماهای بدون خلبان، روباتهای صنعتی/زمینی کوچک و احتمالاً به زودی در تلفنهای هوشمند شخصی همراه شوند؛ این امر سبب میشود که لیدار در همه کاربردها حضور داشته باشد.
با وجود طیف سنج های مینیاتوری، دوربینهای مخفی و همچنین توسعه قطعات سازگار با تلفنهای هوشمند، و به مدد مونتاژهای اپتومکانیکی، منبع نور و پیشرفتهای تکمیلی، سیستمهای لیدار از نظر اندازه و قیمت در حال کاهش هستند.
مکانیک مینیاتور سازی
با وجود سیستمهای لیدار در اندازه های رومیزی و قیمتهای ده ها هزار دلاری که اطلاعاتی با تفکیک پذیری بالا را در فاصله های دور ارائه میدهند، استفاده گسترده از سیستمهای لیدار معمول برای کاربردهای تجاری و نظامی محدود شده است. آژانس پروژه تحقیقاتی پیشرفته دفاعی[۲] (DARPA؛ شهر آرلینگتون، VA) تکنولوژی نزدیک برد با میدان دید گسترده و بسیار سریع الانتقال که از نظر الکترونیکی با فرستنده فوتونیکی هدایت میشود ([۳]SWEEPER) و تکنولوژی اسکن اپتیکی غیرمکانیکی را برروی یک میکروچیپ گردآوری میکند را توسعه داده است [۱].
بدون استفاده از مانتهای نگهدارنده بزرگ، کند و حساس به فشار و دما، لنزها و سرووها[۴]، تکنولوژی سوئیپر[۵] میتواند باریکه لیزر را بیش از ۱۰۰۰۰۰ بار یا ۱۰۰۰۰ بار در ثانیه سریعتر از سیستمهای مکانیکی پیشرفته رایج، به عقب و جلو حرکت دهد. بعلاوه این تکنولوژی باریکه لیزر را حول یک قوس ۵۱ درجه هدایت میکند، که به گفته دارپا، این گسترده ترین میدان دیدی است که تاکنون از طریق یک سیستم اسکن اپتیکی در مقیاس چیپ بدست آمده است.
در اصل سوئیپر از تکنولوژی آرایه فازی اپتیکی استفاده میکند که در آن سطوح مهندسی شده جهت سیگنالهای الکترومغناطیسی انتخاب شده را با تغییر فاز در سرتاسر تعداد زیادی آنتن کوچک کنترل میکنند. در فرکانسهای اپتیکی، از آنجایی که طول موج های نور هزاران بار کوچکتر از طول موج هایی است که در رادار استفاده میشوند، اجزای آرایه آنتنها باید تنها در فاصله چند میکرونی از یکدیگر جا داده شوند بطوریکه اختلالات ساختاری یا محیطی، حتی در حد ۱۰۰ نانومتر، موجب تضعیف این آرایه نشوند.
با وجود اینکه سوئیپر عمل هدایت باریکه اپتیکی را از نظر ابعاد کوچک میکند، اما برای اینکه یک سیستم لیدار اسکنی بر پایه چیپ تولید شود قطعات بسیار بیشتری مورد نیاز است. برای دستیابی به این امر، هدف برنامه مجتمع سازی قطعات ناهمگن الکترونیکی و فوتونیکی [۶]E-PHI دارپا، استفاده از فرآیندهای ساخت نیمه رسانای استاندارد (که مشکلات عدم تطابق شبکه ای را برطرف میکند) برای ترکیب آنتنها، تقویت کننده های نوری، مدولاتورها، آشکارسازها و حتی یک منبع نوری بسیار کوچک است که توسط محققین دانشگاه کالیفرنیا، سانتا باربارا (UCSB) توسعه یافته است. این کار از طریق رشد لایه ایندیوم آرسناید به صورت نقطه های کوانتومی برای تشکیل یک سیستم لیدار کامل صورت گرفته است (شکل۱) [۲].
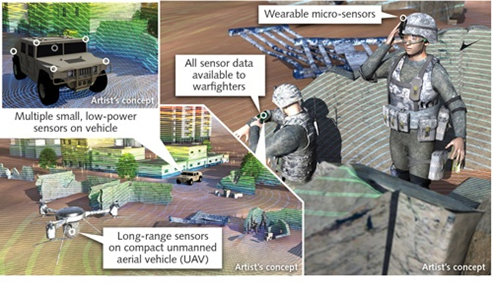
شکل ۱- تکنولوژی سوئیپر، به صورت غیرمکانیکی هدایت باریکه را بر سطح نیمه رسانای در مقیاس چیپ برای توسعه سیستم لیدار مینیاتوری انجام میدهد. سنسورهای لیدار بسیار ریز میتوانند روی وسایل نقلیه متحرک یا برروی افراد رزمنده نصب شوند تا با توجه به موقعیت و میزان تهدیدهای امنیتی بالقوه، اطلاعات در لحظه گزارش دهند.
وضعیت لیدار در مقیاس چیپ دارپا همانند بسیاری از پروژه های دولتی آمریکا نیازمند شناخت بیشتر است. با این حال تکنولوژی آرایه فازی اپتیکی برای تصویرساز همدوس نانوفوتونیک مؤسسه تکنولوژی کالیفرنیا (کلتک، پاسادانا، CA) بنیادی است. این تصویرساز مینیاتوری سه بعدی، از آنتنهای فوتونیکی سیلیکانی با آرایش ۴×۴ استفاده میکند و نور را از جسم (نور همدوس یک دیود لیزر با طول موج ۱۵۵۰ نانومتر به آن تابیده شده است) به توریهای موجبر نانوفوتونیکی که سیگنال اپتیکی (تقریباً ۴ میلی وات در هر پیکسل) را به اطلاعات فاز و شدت تبدیل میکند و برای ساخت تصویر لیدار سه بعدی با تفکیک پذیری فضایی ۱۵ میکرون در فاصله ۰٫۵ متری کاربرد دارند، انتقال میدهد (شکل ۲) [۳].
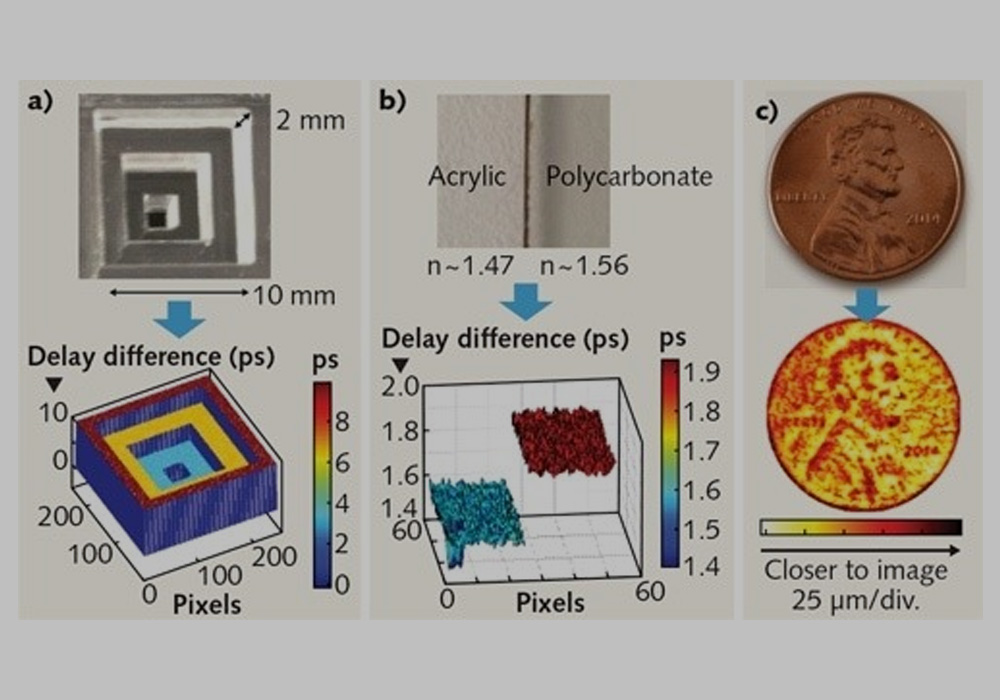
شکل ۲- نمونه هایی از تصویربرداری همدوس نانوفتونیکی ([۷]NCI) شامل (a) تصویر سه بعدی انتقال یافته از یک هرم شفاف (b) تصویربرداری کنتراست ضریب شکست به صورتی که اختلاف ضریب شکست دو ماده با ضخامت یکسان را میتوان مشخص کرد و (c) نمایش عمق تصویر یک سکه یک سنتی آمریکا با استفاده از روش NCI درحالت بازتابی. رنگهای پیکسل عمقهای متفاوت تصویر را در یک محدوده فضایی ۱۴۰ میکرومتر نشان میدهند.
اگرچه دستگاه کلتک حاوی ۱۶ پیکسل در یک مسیر ۳۰۰×۳۰۰ میکرومتری است، اما ده ها هزار از این پیکسلها (و یک منبع با شدت بالاتر) برای کاربردهای لیدار دور برد برای اجسام بزرگتر مورد نیاز است.
افقهای منبع نور
اگرچه یک خودرو بدون سرنشین از نظر فیزیکی به اندازه کافی بزرگ است تا با لیدار در مقیاس آزمایشگاهی سازگار شود، اما هزینه ای که صرف یک وسیله نقلیه بدون سرنشین با این قابلیت و حجم میشود دارای اهمیت است. بدین منظور باید منابع گران قیمت لیدار لیزر حالت جامد پمپ شده با لیزر دیود[۸] (DPSS) و لیزر فیبر، با لیزرهای کم حجم تری جایگزین شوند. به عنوان مثال سیستمهای لیدار نوری بر پایه لیزر نیمه هادی در TriLumina (شهر آلبوکرک، NM)، از لیزرهای گسیل از سطح با کاواک عمودی[۹] (VCSEL)، دیود لیزر telecom-grade استاندارد و بی خطر برای چشم که در چیدمان کلتک هم استفاده شده است و یا حتی لیزر نقطه کوانتومی قرار گرفته روی تراشه یا سایر منابع مجتمع که در دارپا دنبال میشوند، استفاده میکند.
اما به راستی یک منبع نور چقدر باید پرتوان باشد تا حساسیت مورد نیاز را ارائه دهد؟ البته پاسخ این سؤال بستگی به کاربرد دارد. به عنوان مثال برای تصویربرداری از یک پنی (کوچکترین واحد پول در آمریکا) در فاصله ۰٫۵ متری، یک منبع نور صدها میلی واتی مورد نیاز است؛ در حالیکه برای اینکه یک خودرو بدون سرنشین فاصله ۲۰ متری مقابل خود و یا یک هواپیما، هام وی[۱۰] (جیپ مدرن نظامی) را در فاصله ۳۰۰۰۰ فوتی ببیند، منابع نوری ده ها واتی و حتی کیلو واتی مورد نیاز است.
برای مثال، یک جایگزین برای لیدار با آرایه فازی- اپتیکی، لیدار تک فوتونی است، این دستگاه ۱۶۳۸۴ پیکسلی ساخته شده در آزمایشگاه لینکلن MIT (شهر لکسینگتون،MA ) میتواند ۶۰۰ مترمربع از یک منظره را در فاصله ۱۰۰۰۰ فوتی با تفکیک پذیری ۳۰ سانتیمتر تصویربرداری کند [۴]. مجوز اولین واحدهای تجاری ۱۵۰۰۰۰ دلاری در اندازه های جعبه کفش که به منابع لیزری با توان کمتر از کیلووات نیاز دارند، به پرینستون لایت ویو[۱۱] (شهر کران بری، NJ) و اسپکترولب[۱۲] (شهر سیلمار، CA) داده شد.
پیش به سوی حضور در همه کاربردها
خوشبختانه، تفکیک پذیری در حد سانتیمتر در ده ها هزار فوت، برای بسیاری از کاربردها مثل ماشینهای بدون راننده و نقشه برداری هوایی با ارتفاع کم، بیش از حد مورد نیاز است.
افقهای منبع نور
اگرچه یک خودرو بدون سرنشین از نظر فیزیکی به اندازه کافی بزرگ است تا با لیدار در مقیاس آزمایشگاهی سازگار شود، اما هزینه ای که صرف یک وسیله نقلیه بدون سرنشین با این قابلیت و حجم میشود دارای اهمیت است. بدین منظور باید منابع گران قیمت لیدار لیزر حالت جامد پمپ شده با لیزر دیود[۸] (DPSS) و لیزر فیبر، با لیزرهای کم حجم تری جایگزین شوند. به عنوان مثال سیستمهای لیدار نوری بر پایه لیزر نیمه هادی در TriLumina (شهر آلبوکرک، NM)، از لیزرهای گسیل از سطح با کاواک عمودی[۹] (VCSEL)، دیود لیزر telecom-grade استاندارد و بی خطر برای چشم که در چیدمان کلتک هم استفاده شده است و یا حتی لیزر نقطه کوانتومی قرار گرفته روی تراشه یا سایر منابع مجتمع که در دارپا دنبال میشوند، استفاده میکند.
اما به راستی یک منبع نور چقدر باید پرتوان باشد تا حساسیت مورد نیاز را ارائه دهد؟ البته پاسخ این سؤال بستگی به کاربرد دارد. به عنوان مثال برای تصویربرداری از یک پنی (کوچکترین واحد پول در آمریکا) در فاصله ۰٫۵ متری، یک منبع نور صدها میلی واتی مورد نیاز است؛ در حالیکه برای اینکه یک خودرو بدون سرنشین فاصله ۲۰ متری مقابل خود و یا یک هواپیما، هام وی[۱۰] (جیپ مدرن نظامی) را در فاصله ۳۰۰۰۰ فوتی ببیند، منابع نوری ده ها واتی و حتی کیلو واتی مورد نیاز است.
برای مثال، یک جایگزین برای لیدار با آرایه فازی- اپتیکی، لیدار تک فوتونی است، این دستگاه ۱۶۳۸۴ پیکسلی ساخته شده در آزمایشگاه لینکلن MIT (شهر لکسینگتون،MA ) میتواند ۶۰۰ مترمربع از یک منظره را در فاصله ۱۰۰۰۰ فوتی با تفکیک پذیری ۳۰ سانتیمتر تصویربرداری کند [۴]. مجوز اولین واحدهای تجاری ۱۵۰۰۰۰ دلاری در اندازه های جعبه کفش که به منابع لیزری با توان کمتر از کیلووات نیاز دارند، به پرینستون لایت ویو[۱۱] (شهر کران بری، NJ) و اسپکترولب[۱۲] (شهر سیلمار، CA) داده شد.
پیش به سوی حضور در همه کاربردها
خوشبختانه، تفکیک پذیری در حد سانتیمتر در ده ها هزار فوت، برای بسیاری از کاربردها مثل ماشینهای بدون راننده و نقشه برداری هوایی با ارتفاع کم، بیش از حد مورد نیاز است.
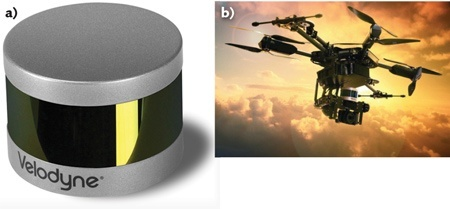
شکل ۳- (a) سیستم های لیدار مینیاتوری مانندVelodyne VLP-16 (b) برای نقشه برداری هوایی در ارتفاع کم با پهباد ۸ پروانهای UAV به اندازه کافی قدرتمند هستند.
لیدار Velodyne ۷۹۹۹ دلاری ۱۶- باریکه ای به نام “Puck” یا VLP-16 (در اندازه ۷۲×۱۰۳ میلیمتر و وزن ۸۳۰ گرم) داده های سه بعدی را در یک اسکن ۳۶۰ درجه با زاویه عمود ۳۰ درجه و برد ۱۰۰ متر و توان مصرفی ۸ وات و دقت ۳± سانتیمتر ارائه میدهد [۵]. شرکت نرم افزاری و سخت افزاری UAV با نام XactSense، یک UAVهشت پره ای که به یک لیدار Velodyne’s VLP-16 Puck مجهز شده را ارائه داده است. این دستگاه در لحظه تصویربرداری سه بعدی هوایی را برای نمایش زیرساختها، امور امداد سوانح و نظارت کلی امکانپذیر میسازد (شکلهای ۳ و ۴) [۶].
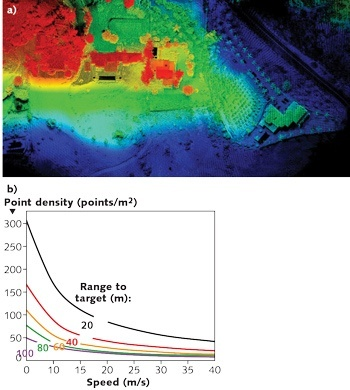
شکل ۴– (a) توده نقطه ای ایجاد شده توسط سنسور لیدار VLP-16که روی وسیله نقلیه هوابرد بدون سرنشین نصب شده است. (b) نمودار، نحوه ارتباط بین رنگ و چگالی توده نقطه ای را به عنوان تابعی از ارتفاع نشان میدهد.
طبق گفته مدیر فروش و بازاریابی شرکت Velodyne، ولفگانگ جاشمن، با افزودن یک منبع لیزر کلاس یک بی خطر برای چشم، با طول موج ۹۰۵ نانومتر، سیستم لیدار Velodyne VLP-16 کم هزینه، خط سیر تولیدی را دنبال میکند که باعث میشود قیمت این سیستم نسبت به هفت سال گذشته ده مرتبه کاهش یابد [۷]. در این صورت آیا ما کاهش ده مرتبه ای دیگری برای لیدار ۸۰۰ دلاری در هفت سال بعدی خواهیم دید؟ شرکت Systems Quanergy(شهر سانی ویل، CA) میگوید خیر، حتی میتواند بهتر از این نیز کاهش یابد.
شرکت Quanergyبا سیستم لیدار ۲۵۰ دلاری در اندازه کارت اعتباری در نمایشگاه لوازم الکترونیکی مصرفی در ژانویه ۲۰۱۶ شرکت کرد [۸]. این سیستم با برد ۳۰۰ متر، دقت در حد سانتیمتر، پویش ۳۶۰ درجه ای، و با قابلیت کار در تمام شرایط آب و هوایی، پیش به سوی ایمن بودن وسیله نقلیه و رانندگی بدون سرنشین میرود. بنیانگذار و مدیرعامل Quanergy میگوید: “ما با لیدار مکانیکی قیمتهای ۱۰۰۰ دلاری را شکستیم و با لیدار حالت جامد نیز قیمتهای ۱۰۰ دلاری را خواهیم شکست.” درحالیکه Quanergy هنوز نمیتواند بر جزئیات طرح حالت جامد اظهارنظر کند، اما برای به کار گرفتن محتاطانه این تکنولوژی در اتومبیلهای بدون سرنشین بدون اینکه تأثیری بر طراحی زیبای آن داشته باشد، طرحهایی در نظر دارد (شکل ۵).
شرکت Quanergyبا سیستم لیدار ۲۵۰ دلاری در اندازه کارت اعتباری در نمایشگاه لوازم الکترونیکی مصرفی در ژانویه ۲۰۱۶ شرکت کرد [۸]. این سیستم با برد ۳۰۰ متر، دقت در حد سانتیمتر، پویش ۳۶۰ درجه ای، و با قابلیت کار در تمام شرایط آب و هوایی، پیش به سوی ایمن بودن وسیله نقلیه و رانندگی بدون سرنشین میرود. بنیانگذار و مدیرعامل Quanergy میگوید: “ما با لیدار مکانیکی قیمتهای ۱۰۰۰ دلاری را شکستیم و با لیدار حالت جامد نیز قیمتهای ۱۰۰ دلاری را خواهیم شکست.” درحالیکه Quanergy هنوز نمیتواند بر جزئیات طرح حالت جامد اظهارنظر کند، اما برای به کار گرفتن محتاطانه این تکنولوژی در اتومبیلهای بدون سرنشین بدون اینکه تأثیری بر طراحی زیبای آن داشته باشد، طرحهایی در نظر دارد (شکل ۵).

شکل ۵– خودرو مرسدس بنزE350 متشکل از سه واحد لیدار و یک صفحه نمایش.
همچنین پیش بینی شده است که لیدار با قیمت کمتر از ۱۰۰ دلار نیز توسط شرکت Phantom Intelligence (شهر کبک، QC، کانادا) به بازار عرضه شود. این تکنولوژی مبتنی بر لیدار نوری[۱۳] همانند دوربین سه بعدی و بدون هیچ بخش متحرکی تنها از یک پرتو لیزر پراکنده شده برای روشن کردن محیط و چندین قطعه گیرنده به منظور بازسازی تصویر در یک نوار °۳۰×°۸ با برد بیش از ۳۰ متر استفاده میکند.
لیزر دیودهای مربوط به شرکتOsram Opto Semiconductors (شهر رگنسبورگ، آلمان) توان سیستم Phantom Intelligence را افزایش میدهند. این لیزرها در طول موج ۹۰۵ نانومتر با توان بیشینه ۷۰ وات، فرکانس ۱۰ کیلوهرتز و پهنای پالس ۴۰ نانوثانیه کار میکنند. مجموعه این لیزر دیود دارای یک درایور مجتمع است و چیپها به تنهایی بسته به جریان اعمالی میتوانند به توان بیش از ۷۰ وات دست یابند. شرکت Osram برای بهبود لیزر دیودهای خاص لیدار در حال کار با تأمین کننده های قطعات کلیدی است. آنها یا از طریق بهینه سازی سیستمهای میکروالکترومکانیکی یا با استفاده از طرح های اپتیکی بهبودیافته، افت تزویج را کاهش میدهند. سپس این منبع لیدار قابل اعتماد با سیستم پردازش سیگنال دیجیتال تکمیل میشود و سبب به حداکثر رساندن برد تشخیص سیستم لیدار، حذف تشخیصهای نادرست و بوجود آمدن امکان تشخیص پیشرفته در شرایط سخت و نامساعد میشود.
شرکت Phantom Intelligence اعلام کرد که بسیاری از کاربردها به دقتهای زاویه ای خیلی عالی نیاز ندارد. به عنوان مثال میتوان چندین سنسور را به صورت مهندسی شده روی نقاط مختلف وسیله نقلیه قرار داد تا ۳۶۰ درجه را پوشش دهد. آقای جین یوس دشنس رئیس شرکت Phantom Intelligence میگوید: “میزان داده مورد نیاز نه تنها بر هزینه سنسور، بلکه بر هزینه سخت افزار مورد نیاز برای پردازش نهایی تأثیر قابل توجهی دارد.” او در ادامه میگوید: “به نظر ما متقاضی باید با توجه به اهداف کاربردی مورد نظرش و با در نظر گرفتن دقت، برد، میدان دید و قیمت، محصول مورد نظر را انتخاب کند.”
لیزر دیودهای مربوط به شرکتOsram Opto Semiconductors (شهر رگنسبورگ، آلمان) توان سیستم Phantom Intelligence را افزایش میدهند. این لیزرها در طول موج ۹۰۵ نانومتر با توان بیشینه ۷۰ وات، فرکانس ۱۰ کیلوهرتز و پهنای پالس ۴۰ نانوثانیه کار میکنند. مجموعه این لیزر دیود دارای یک درایور مجتمع است و چیپها به تنهایی بسته به جریان اعمالی میتوانند به توان بیش از ۷۰ وات دست یابند. شرکت Osram برای بهبود لیزر دیودهای خاص لیدار در حال کار با تأمین کننده های قطعات کلیدی است. آنها یا از طریق بهینه سازی سیستمهای میکروالکترومکانیکی یا با استفاده از طرح های اپتیکی بهبودیافته، افت تزویج را کاهش میدهند. سپس این منبع لیدار قابل اعتماد با سیستم پردازش سیگنال دیجیتال تکمیل میشود و سبب به حداکثر رساندن برد تشخیص سیستم لیدار، حذف تشخیصهای نادرست و بوجود آمدن امکان تشخیص پیشرفته در شرایط سخت و نامساعد میشود.
شرکت Phantom Intelligence اعلام کرد که بسیاری از کاربردها به دقتهای زاویه ای خیلی عالی نیاز ندارد. به عنوان مثال میتوان چندین سنسور را به صورت مهندسی شده روی نقاط مختلف وسیله نقلیه قرار داد تا ۳۶۰ درجه را پوشش دهد. آقای جین یوس دشنس رئیس شرکت Phantom Intelligence میگوید: “میزان داده مورد نیاز نه تنها بر هزینه سنسور، بلکه بر هزینه سخت افزار مورد نیاز برای پردازش نهایی تأثیر قابل توجهی دارد.” او در ادامه میگوید: “به نظر ما متقاضی باید با توجه به اهداف کاربردی مورد نظرش و با در نظر گرفتن دقت، برد، میدان دید و قیمت، محصول مورد نظر را انتخاب کند.”
آقای دشنس پیش بینی میکند که تکنیکهای مجتمع سازی و عملکرد تفکیک پذیری این سیستمهای لیدار حالت جامد مینیاتوری در آینده پیشرفت خواهد کرد. این سیستمها به گونه ای پیشرفت میکنند که در نهایت، توانمندی آنها برابر با سیستمهای لیدار پویشی گران قیمت می شود اما با هزینه کم. به گفته او “در هر ۲۵ ثانیه یک فرد در جاده میمیرد و در نتیجه وسایل نقلیه بدون سرنشین ایمنتر هستند. این تنها یک نمونه از اهمیت این سیستمها برای متخصصین فوتونیک است تا این اطمینان را بدهد که سیستمهای لیدار مینیاتوری کم هزینه در بازار موفق میشوند.”
REFERENCES
1. A. Yaacobi et al., Opt. Lett., 39, 15, 4575–۴۵۷۸ (Aug. 2014).
2. A. Y. Liu et al., Appl. Phys. Lett., 104, 4, ۰۴۱۱۰۴ (۲۰۱۴).
۳٫ F. Aflatouni et al., Opt. Express, 23, 4, 5117–۵۱۲۵ (Feb. 2015).
4. See http://bit.ly/1ypyObF.
5. See http://bit.ly/1Ni6xyW.
6. See http://bit.ly/1LXkyR1.
7. See http://bit.ly/1FxJ3iU.
8. See http://on.wsj.com/1HUaZBz.
Source: http://www.laserfocusworld.com/articles/print/volume-51/issue-10/features/lidar-lidar-nears-ubiquity-as-miniature-systems-proliferate.html
1. A. Yaacobi et al., Opt. Lett., 39, 15, 4575–۴۵۷۸ (Aug. 2014).
2. A. Y. Liu et al., Appl. Phys. Lett., 104, 4, ۰۴۱۱۰۴ (۲۰۱۴).
۳٫ F. Aflatouni et al., Opt. Express, 23, 4, 5117–۵۱۲۵ (Feb. 2015).
4. See http://bit.ly/1ypyObF.
5. See http://bit.ly/1Ni6xyW.
6. See http://bit.ly/1LXkyR1.
7. See http://bit.ly/1FxJ3iU.
8. See http://on.wsj.com/1HUaZBz.
Source: http://www.laserfocusworld.com/articles/print/volume-51/issue-10/features/lidar-lidar-nears-ubiquity-as-miniature-systems-proliferate.html
[۱] Light Detection and Ranging
[۲] Defense Advanced Research Projects Agency
[۳] Short-range Wide-field-of-view Extremely agile Electronically steered Photonic EmitteR
[۴] Servos
[۵] SWEEPER
[۶] Electronic-Photonic Heterogeneous Integration
[۷] Nanophotonic Coherent Imaging
[۸] Diode-Pumped Solid-State
[۹] Vertical-Cavity Surface-Emitting Lasers
[۱۰] Humvee
[۱۱] Princeton Lightwave
[۱۲] Spectrolab
[۱۳] Flash Lidar