درباره اتومبیل های خودران و چالش های آن بیشتر بدانید!!
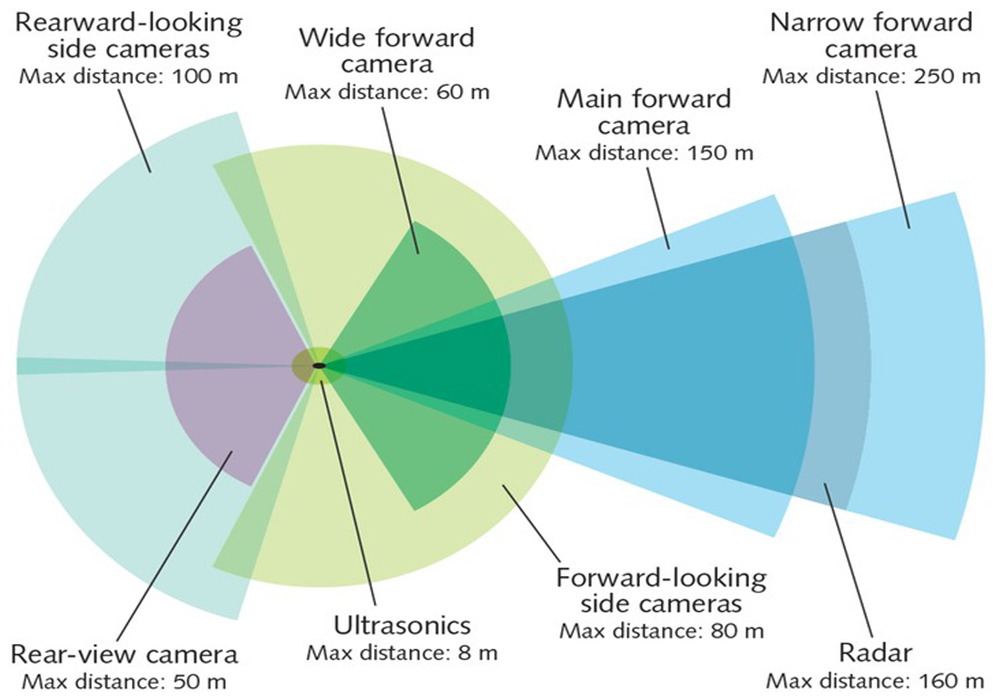 شکل ۱- گستره حسگرهای به کار رفته در سیستم کنترل خودکار موتور تسلا
شکل ۱- گستره حسگرهای به کار رفته در سیستم کنترل خودکار موتور تسلا
همه ما گاهی درباره اتومبیل های خودران شنیده ایم اما آنچه کمتر گفته شده است آنست که اگرچه بهره گیری از ربات ها به عنوان فناوری جانبی اتومبیل ها بسیار رایج و آسان است اما سپردن همه فرآیند رانندگی (هر جا و هر زمان) به یک ربات بسیار دشوار است. آنچه که می توان در مرحله نخست از ربات انتظار داشت، رانندگی در جاده و آب و هوای خوب است. اگرچه در آگوست ۲۰۱۶ شرکت فورد موتور با اطمینان اعلام کرد که در سال ۲۰۲۱ خودروهای تاکسی-ربات بدون فرمان، پدال گاز و یا پدال ترمز را می توان برای استفاده در گستره جادههای کنترل شده حفاظ دار در اختیار داشت و گروه های دیگری هم از این دست ادعاها داشتند اما هیچ کدام به هدف نرسیدند. طرح های جاه طلبانه برای پیشرفت سریع اتومبیل های کاملاً خودکار با مشکلات غیر قابل منتظرهای همچون تریلرهای بزرگ سفید و حصار بزرگراه ها، روبرو شدند!
البته این به معنای خداحافظی با اتومبیل های خودران نیست و به گفته فعالان این حوزه از جمله جیسون ایشنهولز[۱]، بنیانگذار و رئیس فناوری دفتر تکنولوژی لومینار، اتومبیل های خودران، باز هم به بازار خواهند آمد اما با انتظاراتی که از آن می توان داشت، کاملاً منطبق نخواهد بود. در واقع از اتومبیل خودران نمی توان و نباید انتظار داشته باشید که مثل یک ربات راننده هر روز صبح شما را به محل کار برساند، همه طول روز را در گاراژ منتظر شما بماند و شما را شب به منزل بازگرداند. در عوض، حمل و نقل تبدیل به خدماتی می شود که ناوگان تاکسی و کامیون های رباتیک، که قیمت هر کدام صدها هزار دلار است، به صورت رضایت بخشی ارائه می دهند و درآمد این ناوگان از طریق جابه جایی انسان و وسیله در کل طول روز، به دست می آید. متخصصان انتظار دارند که چنان وسایل نقلیه ای به سطح چهار از اتومبیل های خودران برسند که در آنها مسافران فقط در طول سفرشان در جاده های مناسب و آب و هوای عادی می توانند فارغ از شرایط خارج از ماشین باشند.
رده بندی سیستم های رانندگی خودکار
به طور کلی رانندگی خودکار شامل پنج سطح است:
سطح صفر: انسان همه چیز را کنترل میکند؛
سطح یک: رانندگی همراه با سیستم های کمکی مثل سیستم کنترل و مسیریاب کروز است؛
سطح دو: ساختارهای بیشتری خودکار هستند مثل سیستم شتاب و کاهش سرعت اتومبیل و یا مرکز مسیریابی، در اتومبیل های خودران سطح دو، دست های راننده آزاد هستند اما باز هم راننده باید به رانندگی توجه داشته باشد و آماده باشد که در هر لحظه، کنترل اتومبیل را به دست بگیرد؛
سطح سه: وسیله نقلیه به سیستم های ایمنی بحرانی مجهز می شود اما باز هم راننده باید هر لحظه آماده در اختیار گرفتن کنترل سرعت باشد؛
سطح چهار: وسیله نقلیه به گونه ای طراحی می شود که همه عملکردهای یک رانندگی ایمن را اجرا کند و در کل طول سفر، مراقب شرایط جاده هم باشد اما این سیستم خودکار برای رانندگی در هر زمان و یا هر جاده ای هم مناسب نیست؛
و در نهایت سطح پنج: حالتی است که وسیله نقلیه در همه شرایط می تواند به صورت خودکار عمل کند.
انتظار دستیابی به اتومبیل های خودران سطح ۴ اگر چه رضایت بخش است اما همه انتظارات را برآورده نمیکند. داستان اتومبیل های خودران از یک مسیر ده ساله به اینجا رسیده است و به گفته متخصصان اکنون می توان به سادگی اتومبیلی ساخت که در ۹۹ درصد مواقع خوب عمل کند اما آنچه مصرف کنندگان می خواهند آنست که دقت عملکرد اتومبیل خودران، پنج یا شش مرتبه بهتر از این باشد (۹۹٫۹۹۹۹۹۹). البته که رسیدن به این دقت بیشتر، سخت و بسیار گران است زیرا مسائل پیش رو برای یک سیستم رانندگی خودکار در گستره ی وسیعی از یک روز آفتابی در یک جاده یک طرفه تا شب طوفانی برفی در یک جاده پر پیچ و خم که در آن همه علائم مبهم هستند، متفاوت است و اتومبیل های خودران اولیه، برای شرایط ساده مناسبند نه شرایط سخت.
یک اتومبیل چگونه خودران می شود؟
امروزه بسیاری از اتومبیل ها ساختارهایی برای کمک به راننده دارند مثل ترمز خودکار، مسیر یاب و پارک کمکی این ابزارهای کمکی بر مبنای برخی حسگرهای مناسب و نیز داده های بارگذاری شده از نقشه ها و نیز اطلاعات ارسال شونده توسط اتومبیل های دیگر پایه گذاری شده اند. در نهایت این اطلاعات با کامپیوتر و نرم افزارهای هوش مصنوعی آمیخته می شوند تا به راننده ها کمک کنند. ماشین های بدون راننده با کمک حسگرهای اضافهتر و نرم افزارهای بیشتر، پا را برای خارج کردن راننده از حلقه رانندگی، یک قدم فراتر گذاشته اند.
رضایت بخش ترین سیستم کمکی راننده برای وسایل نقلیه شخصی، یک سیستم کنترل خودکار است و شرکت موتور تسلا آن را توسعه و بهبود داده است. در شکل ۱ مجموعه حسگرهای سیستم کنترل خودکار شرکت تسلا نشان داده شده است. در این سیستم کنترل خودکار، دوربین های عکاسی مهمترین نقش را بازی می کنند. یک دوربین عکاسی با زاویه بسته در جلو خودرو تا فاصله ۲۵۰ متری را بررسی می کند، دوربین اصلی جلو تا فاصله ۱۵۰ متری را با گستره دید وسیع تر پوشش می دهد و دوربین های چشم ماهی در دو طرف جلوی خودرو، چراغهای راهنمایی و نشانه های دیگر را در مسیر خودرو بررسی می کنند. همزمان یک رادار میکروموج نیز فواصل را تا ۱۶۰ متری اندازه گیری می کند. دوربین های پشتی شامل دو دوربین در دوطرف و دوربین سوم در مرکز است. همچنین چندین حسگر فراصوت در برد ۸ متری، خودرو را احاطه کرده اند تا برای پارک موازی و وسایل نقلیه ای که امکان برخورد دارند، کمک رسان باشند.
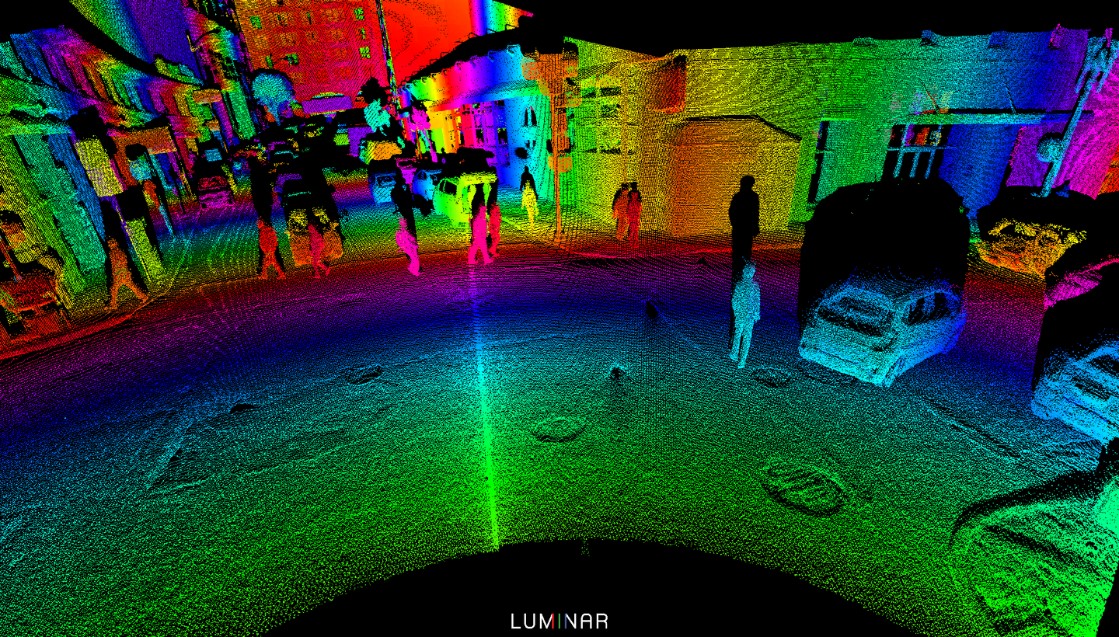 شکل ۲- تصویرسازی لیدار از یک محیط شهری
شکل ۲- تصویرسازی لیدار از یک محیط شهری
در عین حال باید گفت غایب مهم در موتور تسلا، سیستم لیدار است. به گفته متخصصان، سیستم لیدار برای این وسیله حیاتی است چرا که می تواند با ثبت فضای محلی، پیش فرضی از محیط ارائه کند (شکل ۲). اگرچه تا کنون انواع گوناگونی از لیدارها ساخته و ارزیابی شده اند اما برای مثال الون ماسک[۲]، مدیرعامل تسلا به این دلیل که سیستم لیدار نمی تواند در حالت مه و بارش، چیزی تشخیص دهد، در سال ۲۰۱۹، لیدار را یک پیشنهاد احمقانه و یک حسگر گران و غیرضروری دانسته است.
چنین نگرشی یک تفاوت حیاتی در استراتژی فروش را به دنبال دارد. تسلا خودروهای الکتریکی ظریف را برای کاربری شخصی به شیفتگان فناوری می فروشد که به سیستم کنترل خودکار به چشم یک ابزار کمکی راننده نگاه می کنند. اما بسیاری دیگر از توسعه دهندگان فناوری، در حال طراحی تاکسی-ربات های بدون فرمان به عنوان یک اتومبیل خودران برای جا به جایی مسافرها هستند. آنها همچنین به دنبال گستره ی وسیعی از سیستم های خودران دیگر مثل تاکسی های هوایی، هواپیماهای بدون سرنشین تجاری و نیز سیستم هایی برای استفاده در کارخانه ها، معادن و کشاورزی هستند.
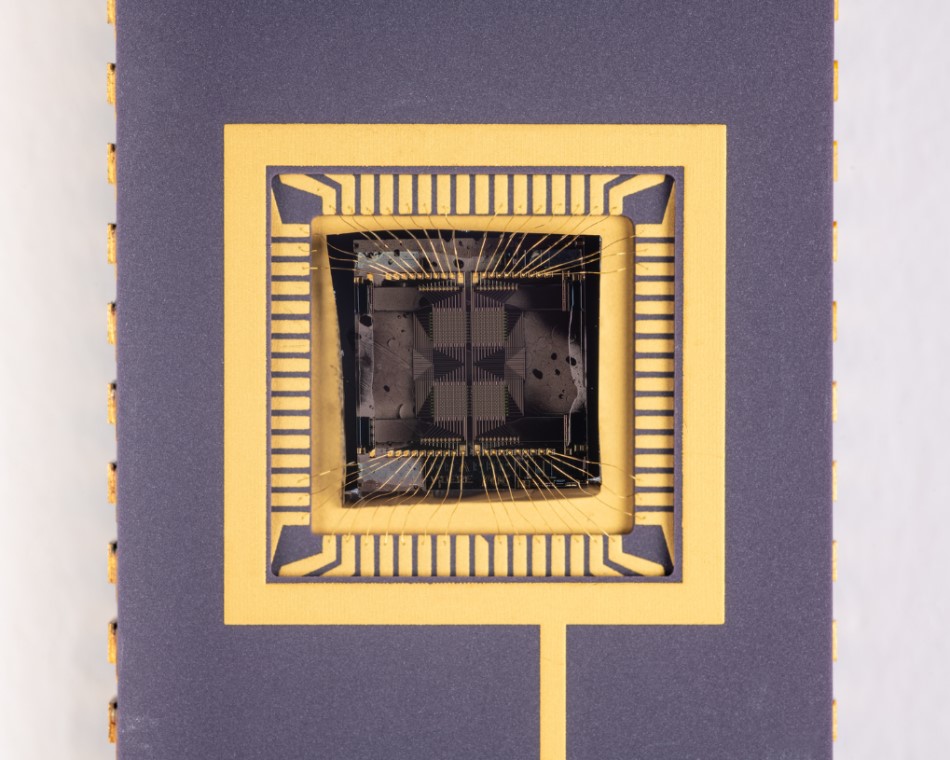 شکل ۳- لیدارهای توسعه یافته روی یک تراشه در آزمایشگاه Draper که در آن از کلیدهای اپتیکی MEMS و موجبرهای اپتیکی کم اتلاف برای گسیل و گردآوری علائم بهره گرفته شده است.
شکل ۳- لیدارهای توسعه یافته روی یک تراشه در آزمایشگاه Draper که در آن از کلیدهای اپتیکی MEMS و موجبرهای اپتیکی کم اتلاف برای گسیل و گردآوری علائم بهره گرفته شده است.
فناوری های تازه برای سیستم های خودران
منطقی است که در سیستم های خودران بر مبنای هر کاربرد، حسگرهایی مورد نیازند. برای مثال سیستم مکانیابی جهانی (GPS) که به طور گسترده ای برای مکان یابی استفاده می شود، گاهی نتایج نادرست به دست میدهد. برخی از سیستم های کنترل خودکار نیازمند شتابدهنده، مغناطیس سنج، فشارسنج و یا ساعت های اتمی با اندازه کشتی هستند تا بتوانند مکان را به صورت دقیق مشخص کنند. وسایل نقلیه خودران نقشه هایی به صورت پیش فرض دارند و آن را با بهره گیری از اطلاعات رسیده از حسگرها به روز می کنند.
از سوی دیگر، حسگرهای این سیستم کنترل خودکار، وجود تلفن های همراه در اطراف را به عنوان یک علامت شانس پایش می کنند و با آن می توانند مکان، مسیر و سرعت را برای پیاده ها و یا دوچرخه سوارها مشخص کنند حتی اگر این تلفن های همراه در اتومبیل های پارک شده یا وسایل نقلیه دیگر مخفی باشند.
شایان یادآوری است که لیدارهای تازهای نیز در حال توسعه هستند. شکل ۳ یک لیدار بر پایه سیستم میکروالکترومکانیکی (MEMS) را نشان می دهد که توسط شرکت دراپر توسعه داده شده است. حسگرهای اپتیکی دیگری نیز به دوربین ها و لیدارها اضافه می شوند مانند حسگرهای لیزری که روی چرخ ها نصب شده اند و سرعت چرخش چرخ را برای اندازه گیری سرعت واقعی وسیله نقلیه، اندازه گیری می کنند. ژیروسکوپ های فیبری، چرخش وسیله نقلیه را در سه محور گردش، استقرار و انحراف اندازه می گیرند. عملکرد بسیار مناسب آنها منجر به کاربرد در وسایل نقلیه آزمایشی شده است اما این ژیروسکوپ ها برای تولید انبوه، بسیار گران هستند. اگر ژیروسکوپ های MEMS ارزانتر ساخته شوند، جایگزین های بسیار مناسبی برای ژیروسکوپ های فیبری خواهند بود. به طور کلی، هدف آن است که مکان یابی وسایل نقلیه خودران با دقت سانتیمتر انجام شود. این در حالی است که با استفاده از GPS های واقعی درون شهرها، دقت حدود چند ده سانتیمتر است. این ژیروسکوپ ها مشکلاتی از قبیل اشتباه های چند مسیری GPS و یا از قلم افتادگی اطلاعات را نیز ندارد.
وسایل نقلیه خودران نیازمند نوعی همجوشی حسگری است!!
وسایل نقلیه خودران نیازمند نوعی همجوشی حسگری است. این بدان معناست که باید اطلاعات حسگرهای مختلف تحلیل و نتایج آمیخته شوند. سیستم های رایج کنونی بر مبنای پالایش کلمان[۳] کار می کنند که در آن آمار و اندازه گیری های چندگانه به هم می پیوندند تا با این حجم داده، نتایج تحلیلی قابل استنادتری به دست آید. در وسایل نقلیه خودران عموماً از یادگیری ماشین و هوش مصنوعی استفاده می شود که هر دو در مسیرهای مشابهی اما معمولاً با سری داده های مشخصی شروع می کنند و نتایج تحلیلی را می سازند. یادگیری ماشین در برخی موارد شناخته شده، بسیار موثر است مثل رانندگی در طول یک جاده با علامت گذاری مناسب در روز روشن اما ضعف آن در تعیین موقعیت غیرعادی و ضعیف آن در مواردی مثل یک جاده بدون علامت آسفالت نشده یا با طوفان برفی است.
سیستم کنترل خودکار تسلا
تسلا در اغلب موارد با سیستم کنترل خودکارش، استاندارد بالایی برای ابزارهای کمکی راننده ها ایجاد کرد بهطوری که در سال ۲۰۱۴ بیش از نیم میلیون اتومبیل تسلا در ایالات متحده امریکا فروخته شد. راننده هایی که عادت کرده بودند در هنگام رانندگی، چشم به جاده بدوزند و دست هایشان را خیلی نزدیک به فرمان، آماده نگه دارند در اتومبیل تسلا دستشان را از فرمان رها می کردند تا ببینند خود فرمان چقدر می تواند خوب عمل کند. برخی پا را از این هم فراتر می گذاشتند. مثل یک راننده مست کالیفرنیایی که در ساعت ۳:۳۰ صبح در حال رانندگی به سمت منزل خوابش برد و تسلا کروز او در طول بزرگراه ۱۰۱ به راه خود ادامه می داد تا اینکه پاترول پلیس آن را دید و متوقف کرد.
شکایت های انجام شده علیه اتومبیل های تسلا با سیستم کنترل خودکار شامل یک تصادف در هر سه میلیون مایل رانندگی بوده است که در مقایسه با آمار امریکا برای هر نیم میلیون مایل یک تصادف، بسیار حایز اهمیت است. به هر حال موارد ناگواری نیز در این میان به چشم می خورد که چالش های عملکرد سیستم تسلا را نشان می دهد. در یک مورد، اتومبیل تسلای یکی از مهندسین شرکت اپل نتوانست از یک شکاف در بزرگراه بگذرد و به یک حصار کوبیده و او کشته شد. ظاهراً راننده در زمان تصادف دست هایش را از روی فرمان برداشته بود و داشت در تلفن همراهش بازی می کرد. مورد دیگری نیز هنگامی رخ داد که تریلرهای سفید کامیون کش با سرعت در بزرگراه در مقابل مسیر تسلا به چپ پیچیده بودند و نه ماشین و نه راننده قبل از کوبیده شدن به تریلر، سرعت را کاهش نداده بودند چرا که دوربین های جلویی تسلا نمی توانستند تفاوت چندانی میان یک تریلر سفید براق و آسمان آبی براق بزرگراه قائل شوند. برای رفع این مشکل نیز دوربین های جلویی تسلا تکرنگ شدند تا بتوانند تصاویر را با سرعت بیشتری از تصاویر رنگی پردازش کنند.
تاکسی-ربات ها خدمات حمل و نقل آینده را ارائه می دهند.
بیزینس تاکسی-ربات ها یعنی فروش وسایل نقلیه خودران به شرکت های بزرگ خدمات حمل و نقل، بیزینس کاملاً متفاوتی از کاربری های شخصی هستند. چنان که شرکت اوبر، وایمو و لیفت در نظر دارند، این خدمات را در جاده های کنترل شده که برای ماشین های خودران امن هستند، آغاز کنند و با پیشرفت فناوری به نواحی دیگر گسترش دهند. این وسایل نقلیه، دارای سیستم های جا به جایی گران و با کیفیت و تعداد زیادی حسگر شامل لیدار (وسیله نقلیه آزمایشی وایمو) هستند و برای نواحی شهری در شهرهای با ترافیک نسبی کم و در سرعتی غیر از سرعت بزرگراه ها طراحی شده و مناسبند. این تمهیدات با کاهش انرژی برخوردی و طول توقف، تعداد و شدت تصادفات را کاهش می دهد و امکان استفاده بهتر از لیدارهای پالسی ۹۰۰ نانومتری را فراهم می سازد.
متخصصان به پیشرفت هایی فراتر از این، مانند به کارگیری لیدارهای ۱۵۵۰ نانومتر و خارج کردن انسان های بیشتری از حلقه رانندگی در طی پنج سال آینده با دستیابی به سطح ۴ سیستم های خودران، می اندیشند. حسگرها و سیستم های دیگر باعث شده اند که قیمت تمام شده تاکسی-ربات ها افزایش یابد و به صدها هزار دلار برسد اما بهره گیری از مزیت ربات ها برای جابه جایی انسان در کل طول روز، این هزینه ها را جبران می کند. در این میان، خودروهای خصوصی تنها برای درصد کمی از جا به جایی ها استفاده می شوند و احتمالاً هیچ کس برای استفاده شخصی وسیله نقلیه خودران نمی خرد چرا که برای چنان مصرفی بسیار گران است. اما انواع دیگری از کمک راننده ها را می توان در خوروهای شخصی به کار برد. تصور کنید که گره های ترافیکی معمولی به وجود بیاید، در این موقع راننده می تواند با فشار یک دکمه چشم از جاده بردارد و آسوده باشد تا زمانی که گره باز میشود و سرعت وسیله نقلیه افزایش می یابد؛ در این هنگام اتومبیل به راننده هشدار می دهد که خودش کنترل وسیله را در اختیار بگیرد. بهتر است نام بزرگراه هایی که نقشه بسیار خوبی دارند و به خوبی از لحاظ موقعیت کنترل می شوند را بزرگراه های خودران گذاشت. در این بزرگراه ها تا چند مایلی مقصد، سیستم های خودران کنترل را به دست می گیرند و وسایل نقلیه آزاد حرکت می کنند، سپس قبل از خروج از بزرگراه و بازگشت به سطح جاده، کنترل به دست راننده داده می شود.
کامیون ها نیز از مزایای همچون بزرگراه های با کنترل سطح بالاتر برخوردار می شوند؛ هنگام رسیدن به ورودیهای بزرگراه، محدودیت رانندگی به وسیله راننده ایجاد می شود و سپس سیستم کنترل خودکار به حالت عادی خود برگردانده می شود تا زمانی که دوباره راننده آن را تحویل بگیرد و ادامه دهد.
محدودیت های تاکسی-ربات ها
برخی کارشناسان ایمنی از جایگزینی راننده های انسانی با ربات ها صحبت کرده اند اما این بیشتر شبیه یک رویاست تا واقعیت. انسان ها بیشتر از ربات ها با شرایط سخت مثل جاده های کثیف ناهموار یا مزرعه ها سازگاری می یابند. ساختن ربات هایی که بتوانند در هرجا و هر شرایطی رانندگی کنند بسیار هزینه بر است و راه اقتصادی برای ساخت آنها وجود ندارد. البته شرایط سخت محدود به جاده های روستایی نمی شود؛ اکثر اوقات علامتگذاری های مسیر جاده وقتی از دست می روند، جایگزین نمی شوند و معمولاً علائم کناره جاده ای کم هستند. ماشین هایی که سیستم های نشانه یاب دارند گاهی آنچنان موج دار حرکت می کنند که راننده ها می ترسند به عنوان رانندگی در حالت مستی دستگیر شوند. مکان هایی که در حال ساخت و ساز هستند معمولاً قابل پیش بینی نیستند و مدت زمان ماندگاری آنها نیز نامشخص است. بورد امنیت حمل و نقل ملی امریکا، در سایتش بخشی از دلایل مرگبار بودن تصادفات تسلا را به مشکلات سیستماتیک مربوط به تعمیر ابزارهای هشدار جاده ای می داند که باعث می شود در مه، برف، یخ و دیگر شرایط بد آب و هواهایی، جاده ها غیر قابل رانندگی شوند.
اعتماد عمومی یک مسئله حیاتی درباره اتومبیل های خودران است. در ابتدا، جامعه به ربات های راننده خوش بین بود که می تواند بر موارد گمراه کننده پیروز شود اما برخی تصادفات کوچک در اثر عدم تنظیم مناسب وسیله نقلیه مثل برخورد با کامیون روشن متوقف، اعتماد عمومی را کم کرد و تصادفات مرگبار هر چند کم، مردم را ترساند. در سال ۲۰۱۸ یکی از این موارد عدم تنظیم دقیق، منجر به عدم تشخیص و کشته شدن یک زن دوچرخه سوار در جاده آریزونا توسط اتومبیل اوبر با سیستم کنترل خودکار شد. در سال ۲۰۱۹ در نظرسنجی عمومی مردم درباره ترس از رانندگی با وسایل نقلیه خودران، نظر ۷۱ درصد مردم داشتن ترس بسیار از رانندگی با اتومبیل های خودکار بوده است. به همین دلیل است که متخصصان معتقدند هنوز زمان می برد تا اتومبیل های خودران ایمن، نظر عموم را بار دیگر به خود جلب کنند.
چشم انداز آینده
چشم انداز آینده این مسیر، دسترسی به ابزارهای کمک راننده بیشتر و هم تاکسی-ربات هاست که البته باید به بلوغ کامل برسد. این کار از طریق بهبود حسگرها و هوش مصنوعی در برخورد با شرایط غیر عادی است. این بدان معناست که باید بزرگراه های بهتری ساخته شود و بزرگراه های سیستم های خودران از مکان های ساخت و ساز یا از امتداد جاده هایی که علائم کهنه دارند، مجزا شود.
در این میان، مرزهای تازه ای هم مانند ایده هواپیماهای شخصی بدون خلبان و وسایل نقلیه هوایی دیگر، برای سیستم های خودکار باز شده است. تاکنون ۶ شرکت توانسته اند مجوز ایمنی لازم برای انتقال هوایی در شهرها را برای جابه جایی مسافران به دست آورند و ۴ تا از این شرکت ها وسیله نقلیه با سیستم کنترل خودکار دارند. اوبر هم درباره تاکسی های هوایی شهری با خلبان انسانی خبرهایی داده است. شرکت آمازون نیز در سال ۲۰۲۰ مجوز تحویل هوایی بسته های کوچک را به دست آورده است. این وسایل نقلیه، نسل جدیدی از چالش های حمل و نقل را پیش رو قرار خواهند داد.
اطلاعات بیشتر:
Source: https://www.laserfocusworld.com/test-measurement/article/14169619/selfdriving-vehicles-many-challenges-remain-for-autonomous-navigation/
[۱] Jason Eichenholz
[۲] Elon Muskg
[۳] Kalman