وقتی به این میرسیم که چه لیزری را برای لیدار استفاده کنیم، متوجه میشویم که یک نوع لیزر برای همه کاربردها به کار نمی آید. طراحان سیستم نیاز دارند که محیط فیزیکی و عملکرد مورد نیاز برای کاربردشان را قبل از اینکه انتخابی انجام دهند، بشناسند.
در این رابطه “شان اسمیت” مدیر فروش لیزرهای RPMC در غرب آمریکا میگوید: صنعت کشاورزی از لیدار برای نقشه برداری زمین و راهنمایی کشاورزان برای بررسی توزیع حاصلخیزی و آفت کشها استفاده میکنند. در بیولوژی و حفظ منابع طبیعی، لیدار ارتفاع پوشش جنگل یا به عبارت دیگر میزان جنگل زدایی را نمایش میدهد. مراکز نظامی از لیدار برای خودروهای بدون سرنشین جهت هدایت، شناسایی اهداف و نقشه برداری دقیق و تاکتیکی استفاده میکنند. در صنعت معدن، لیدارها مناطق حفاری را نقشه برداری میکنند و حجم برداشت خاک را تعیین میکنند. در نقشه برداری، لیدار ساختمانها و مناطق اطراف را برای توسعه آینده نقشه برداری میکند. همچنین سیستم لیدار مورد استفاده در جو، یک توزیع سه بعدی از مخلوط گاز و هوا و مولوکولها را انجام میدهد. این کار جهت مشخصه یابی همه چیز، از آلودگی گرفته تا نحوه توزیع ابرها، باد و حتی تابشهای آتش فشانی به کار میرود (شکل ۱).

در این رابطه “شان اسمیت” مدیر فروش لیزرهای RPMC در غرب آمریکا میگوید: صنعت کشاورزی از لیدار برای نقشه برداری زمین و راهنمایی کشاورزان برای بررسی توزیع حاصلخیزی و آفت کشها استفاده میکنند. در بیولوژی و حفظ منابع طبیعی، لیدار ارتفاع پوشش جنگل یا به عبارت دیگر میزان جنگل زدایی را نمایش میدهد. مراکز نظامی از لیدار برای خودروهای بدون سرنشین جهت هدایت، شناسایی اهداف و نقشه برداری دقیق و تاکتیکی استفاده میکنند. در صنعت معدن، لیدارها مناطق حفاری را نقشه برداری میکنند و حجم برداشت خاک را تعیین میکنند. در نقشه برداری، لیدار ساختمانها و مناطق اطراف را برای توسعه آینده نقشه برداری میکند. همچنین سیستم لیدار مورد استفاده در جو، یک توزیع سه بعدی از مخلوط گاز و هوا و مولوکولها را انجام میدهد. این کار جهت مشخصه یابی همه چیز، از آلودگی گرفته تا نحوه توزیع ابرها، باد و حتی تابشهای آتش فشانی به کار میرود (شکل ۱).
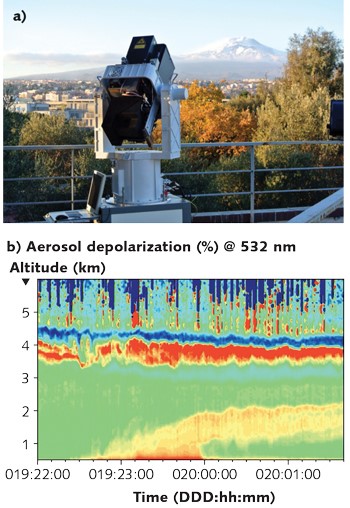
شکل ۱- a) یک آزمایش لیدار قطبشی چند طول موجی جوی[۱] (AMPLE). یک سیستم لیدار چند طول موجی از لیزرهای ۳۵۵، ۵۳۲ و ۱۰۶۴ نانومتری با کانالهای خروجی مجزا و انرژی ۴ میلی ژول و نرخ تکرار ۱ کیلوهرتز و پهنای پالس ۱ نانوثانیه جهت نمایش دادن تابشهای آتش فشانی کوه اتنا استفاده میکند.b ) سیر تکامل زمانی واقطبش جوی القا شده. اندازه گیری بوسیله AMPLE کمک میکند تا بتوان غبار مواد معدنی در ۶ کیلومتر اول بالای زمین را نمایش داد.
سیستمهای لیدار سطح هدف را با استفاده از یک لیزر پالسی تحت تابش قرار میدهند و مدت زمانی که طول میکشد تا سیگنالها به گیرنده بازگردند محاسبه میشود. یک سیستم لیدار برای اینکه بتواند نقشه سه بعدی و داده های مربوطه را بدست آورد، از یک منبع لیزری یا انتقال دهنده، یک فوتودتکتور یا گیرنده حساس، یک همزمان ساز و پردازنده الکتریکی و همچنین تجهیزات کنترل حرکت و اجزائی بر پایه سیستمهای ماکروالکترومکانیکی[۲] (MEMS) جهت انتقال دقیق باریکه استفاده میکند.
اسمیت در ادامه یادآوری میکند: در میان این اجزاء مورد نیاز، خود لیزر در تمام عملکرد سیستم نقش برجسته تری را ایفا میکند. به عنوان مثال، کیفیت باریکه پارامتر اصلی برای تعیین تفکیک پذیری جانبی[x,y] نقشه های لیدار است و پهنای زمانی پالس و جیتر زمانی، پارامتر تعیین کننده برای دقت طولی [z] هستند. انرژی پالس پارامتر کلیدی برای رسیدن به بردهای طولانی تر و نرخ تکرار پالس بالاتر باعث میشود داده برداری با سرعت بالاتری انجام شود.
ملاحظات عملی
اسمیت در ادامه اضافه میکند: لیزرهای حالت جامد پالسی با قله توان بالا (چند ده کیلووات تا چند ده مگاوات) سالها برای کاربردهای لیدار مورد استفاده قرار گرفته اند. اندازه و وزن، قیمت، مصرف انرژی، خنک سازی با آب، حساسیت به ضربه و لرزش و شرایط آب و هوایی سخت باعث میشود که در کاربردهای هوا فضایی و تحرک زیاد محدودیت داشته باشیم. اما شرکتهایی مثل برایت سولوشن[۳] [پاویا، ایتالیا] اخیراً نسل جدیدی از لیزرهای حالت جامد Q سوئیچ با قله توان بالا، پهنای زمانی زیر نانوثانیه و هوا خنک یا خنک کنندگی تماسی را تولید کرده اند که این محدودیتها را حذف کرده و همچنین طول موج های گسترده ای را از فرابنفش (UV) تا مادون قرمز (IR نزدیک) ارائه میدهد.
برای نقشه برداری توپوگرافی هوایی، معمولاً از طول موج حدود ۱ میکرومتر استفاده میشود. در این موارد باریکه به اندازه ای که برای چشم خطرناک نباشد پهن میشود. برای باتی متری[۴] ( نقشه برداری با تفکیک پذیری بالا از کف دریا و نواحی ساحلی) اغلب از یک منبع لیزری هارمونیک دوم ۵۳۲ نانومتر و انرژی بالا استفاده میشود زیرا طول موج سبز بهترین موازنه را بین عبور بالا در آب خالص و برگشت محدود نور بخصوص از زیردریایی برقرار میکند.
اسمیت متذکر میشود که اغلب طول موج های ۵۳۲ نانومتر و ۱ میکرومتر مزایای کم هزینه بودن و مصرف انرژی پایین را دارند اما نیاز به محدوده های دور برد باعث میشود که توان لیزر از محدوده ایمنی کلاس ۱ لیزر افزایش یابد. در این موارد، تابش لیزر میتواند برای چشم خطرناک باشد مگر اینکه قطر باریکه لیزر تا حد مناسب پهن شود ( و این کار باعث افزایش حجم سیستم میشود) تا قوانین ایمنی برای چشم برقرار شود.
لیزرهایی که ذاتاً برای چشم بی خطر هستند به صورت لیدارهای کم حجم و جمع و جور برای کاربردهای غیرنظامی و تجاری مورد استفاده قرار میگیرند. برای مواردی مثل نقشه برداری توپوگرافی که نیاز است اجسام کاوش شوند، در میان طول موج هایی که برای چشم بی خطر هستند اغلب لیزرهای IR با طول موج حدود ۱٫۵ میکرومتر بکار گرفته میشوند. در این موارد جو بسیار شفاف است و آشکارسازها در ۱٫۵ میکرومتر بسیار پربازده هستند. به عنوان جایگزین، طول موج های UV در حدود ۳۵۵ نانومتر یا کوتاهتر بهترین انتخاب برای سیستم های لیدار مورد استفاده در جو و ایمن برای چشم هستند زیرا در محیط جو ضریب بازگشت پرتو نسبتاً بالایی نیز مورد نیاز است.
فراتر از ملاحظات طول موجی، در مورد پهنای پالس لیزر چه چیز را باید در نظر بگیریم؟ اسمیت اضافه میکند: “طراحان لیدار علاقمندند که به تفکیک پذیری اندازه گیری طولی در حد میلیمتر تا سانتی متر دست پیدا کنند. بنابراین، پهناهای پالس کوتاه باید در نظر گرفته شوند. ولی باید در نظر گرفت که پالسهای خیلی کوتاه و در حدود چند پیکوثانیه باعث میشوند که طیف لیزر و پهنای باند گیرنده پهن شود و بنابراین نسبت سیگنال به نویز خراب شود. به عبارت دیگر پالسهای پهن تر از ۱ نانوثانیه منجر به نویز کمتر ولی دقت کمتر میشوند. پس با قرار دادن پهنای پالس در حدود چند صد پیکوثانیه (یا زیر نانوثانیه) بهترین موازنه را برای رسیدن به دقت طولی بالا و نسبت سیگنال به نویز بالا میتوان برقرار کرد.”
برای اینکه نشان دهیم یک نوع لیزر همه نیازها را برآورده نمیکند میخواهیم دو کاربرد بسیار متفاوت خودروهای بدون سرنشین و نقشه برداری از پوشش جنگل را مورد بررسی قرار دهیم.
لیدار خودرو بدون سرنشین
براساس ارزیابی های اخیر از مرکز تحقیقات ABI، تعداد دستگاه های فروخته شده برای خودروها باید به ۶۹ میلیون عدد در سال ۲۰۲۶ برسد. دو نوع سیستم لیدار برای اتومبیل بدون سرنشین موجود است، لیدار فلش سه بعدی[۵] و لیدار پویشی[۶].
لیدارهای فلش از یکسری منابع گسیل دهنده با زاویه زیاد و همچنین اپتیکهای با زاویه زیاد (به عنوان مثال عدسی چشم ماهی) استفاده میکنند. این کار برای متمرکز کردن نور بازتاب شده بر روی ماتریس آشکارساز برای رسیدن به تمام داده پرواز(TOF) [۷] یا مدل سازی اطراف خودرو نیاز است. در مقابل، لیدار پویشی، محیط سه بعدی را خط به خط آدرس میدهد. نور به ترتیب به جهات مختلف تابانیده میشود و بازتابش متناظر از هر کدام، با استفاده از آشکارساز آشکارسازی میشود. همچنین یک منبع لیزر پالسی که برای چشم ایمن باشد نیز باید مورد استفاده قرار بگیرد. لیزر باید این قابلیت را داشته باشد که یک فرد پیاده که در فاصله ۱۰۰ متری لباس تیره پوشیده است را آشکارسازی کند، بتواند در دمای ۴۰- تا ۸۵ درجه سانتیگراد کار کند و همچنین پالس مناسب برای اندازه گیری فاصله با دقت ۱۰ سانتی متر را تابش کند.
با این وجود که منابع لیداری زیادی بر پایه لیزرهای دیودی موجود هستند، لیزرهای فیبری بدون نیاز به خنک سازی نیز مزایای زیادی شامل قابلیت تقسیم شدن توانهای بالای باریکه و فرستاده شدن به چندین موقعیت مکانی سنسور با استفاده از فیبر را نسبت به لیزرهای دیودی پالسی ارائه میدهند (شکل ۲). با استفاده از یک تقویت کننده توان نوسان ساز اصلی[۸] (MOPA)، میتوان به یک لیزر فیبری لیدار در طول موج ۱۵۵۰ نانومتر و نرخ تکرار از ۵ تا ۲۵۰ کیلوهرتز در سطوح توان به ترتیب از ۲۰۰ تا ۳۰۰ وات دست یافت.
اسمیت در ادامه یادآوری میکند: در میان این اجزاء مورد نیاز، خود لیزر در تمام عملکرد سیستم نقش برجسته تری را ایفا میکند. به عنوان مثال، کیفیت باریکه پارامتر اصلی برای تعیین تفکیک پذیری جانبی[x,y] نقشه های لیدار است و پهنای زمانی پالس و جیتر زمانی، پارامتر تعیین کننده برای دقت طولی [z] هستند. انرژی پالس پارامتر کلیدی برای رسیدن به بردهای طولانی تر و نرخ تکرار پالس بالاتر باعث میشود داده برداری با سرعت بالاتری انجام شود.
ملاحظات عملی
اسمیت در ادامه اضافه میکند: لیزرهای حالت جامد پالسی با قله توان بالا (چند ده کیلووات تا چند ده مگاوات) سالها برای کاربردهای لیدار مورد استفاده قرار گرفته اند. اندازه و وزن، قیمت، مصرف انرژی، خنک سازی با آب، حساسیت به ضربه و لرزش و شرایط آب و هوایی سخت باعث میشود که در کاربردهای هوا فضایی و تحرک زیاد محدودیت داشته باشیم. اما شرکتهایی مثل برایت سولوشن[۳] [پاویا، ایتالیا] اخیراً نسل جدیدی از لیزرهای حالت جامد Q سوئیچ با قله توان بالا، پهنای زمانی زیر نانوثانیه و هوا خنک یا خنک کنندگی تماسی را تولید کرده اند که این محدودیتها را حذف کرده و همچنین طول موج های گسترده ای را از فرابنفش (UV) تا مادون قرمز (IR نزدیک) ارائه میدهد.
برای نقشه برداری توپوگرافی هوایی، معمولاً از طول موج حدود ۱ میکرومتر استفاده میشود. در این موارد باریکه به اندازه ای که برای چشم خطرناک نباشد پهن میشود. برای باتی متری[۴] ( نقشه برداری با تفکیک پذیری بالا از کف دریا و نواحی ساحلی) اغلب از یک منبع لیزری هارمونیک دوم ۵۳۲ نانومتر و انرژی بالا استفاده میشود زیرا طول موج سبز بهترین موازنه را بین عبور بالا در آب خالص و برگشت محدود نور بخصوص از زیردریایی برقرار میکند.
اسمیت متذکر میشود که اغلب طول موج های ۵۳۲ نانومتر و ۱ میکرومتر مزایای کم هزینه بودن و مصرف انرژی پایین را دارند اما نیاز به محدوده های دور برد باعث میشود که توان لیزر از محدوده ایمنی کلاس ۱ لیزر افزایش یابد. در این موارد، تابش لیزر میتواند برای چشم خطرناک باشد مگر اینکه قطر باریکه لیزر تا حد مناسب پهن شود ( و این کار باعث افزایش حجم سیستم میشود) تا قوانین ایمنی برای چشم برقرار شود.
لیزرهایی که ذاتاً برای چشم بی خطر هستند به صورت لیدارهای کم حجم و جمع و جور برای کاربردهای غیرنظامی و تجاری مورد استفاده قرار میگیرند. برای مواردی مثل نقشه برداری توپوگرافی که نیاز است اجسام کاوش شوند، در میان طول موج هایی که برای چشم بی خطر هستند اغلب لیزرهای IR با طول موج حدود ۱٫۵ میکرومتر بکار گرفته میشوند. در این موارد جو بسیار شفاف است و آشکارسازها در ۱٫۵ میکرومتر بسیار پربازده هستند. به عنوان جایگزین، طول موج های UV در حدود ۳۵۵ نانومتر یا کوتاهتر بهترین انتخاب برای سیستم های لیدار مورد استفاده در جو و ایمن برای چشم هستند زیرا در محیط جو ضریب بازگشت پرتو نسبتاً بالایی نیز مورد نیاز است.
فراتر از ملاحظات طول موجی، در مورد پهنای پالس لیزر چه چیز را باید در نظر بگیریم؟ اسمیت اضافه میکند: “طراحان لیدار علاقمندند که به تفکیک پذیری اندازه گیری طولی در حد میلیمتر تا سانتی متر دست پیدا کنند. بنابراین، پهناهای پالس کوتاه باید در نظر گرفته شوند. ولی باید در نظر گرفت که پالسهای خیلی کوتاه و در حدود چند پیکوثانیه باعث میشوند که طیف لیزر و پهنای باند گیرنده پهن شود و بنابراین نسبت سیگنال به نویز خراب شود. به عبارت دیگر پالسهای پهن تر از ۱ نانوثانیه منجر به نویز کمتر ولی دقت کمتر میشوند. پس با قرار دادن پهنای پالس در حدود چند صد پیکوثانیه (یا زیر نانوثانیه) بهترین موازنه را برای رسیدن به دقت طولی بالا و نسبت سیگنال به نویز بالا میتوان برقرار کرد.”
برای اینکه نشان دهیم یک نوع لیزر همه نیازها را برآورده نمیکند میخواهیم دو کاربرد بسیار متفاوت خودروهای بدون سرنشین و نقشه برداری از پوشش جنگل را مورد بررسی قرار دهیم.
لیدار خودرو بدون سرنشین
براساس ارزیابی های اخیر از مرکز تحقیقات ABI، تعداد دستگاه های فروخته شده برای خودروها باید به ۶۹ میلیون عدد در سال ۲۰۲۶ برسد. دو نوع سیستم لیدار برای اتومبیل بدون سرنشین موجود است، لیدار فلش سه بعدی[۵] و لیدار پویشی[۶].
لیدارهای فلش از یکسری منابع گسیل دهنده با زاویه زیاد و همچنین اپتیکهای با زاویه زیاد (به عنوان مثال عدسی چشم ماهی) استفاده میکنند. این کار برای متمرکز کردن نور بازتاب شده بر روی ماتریس آشکارساز برای رسیدن به تمام داده پرواز(TOF) [۷] یا مدل سازی اطراف خودرو نیاز است. در مقابل، لیدار پویشی، محیط سه بعدی را خط به خط آدرس میدهد. نور به ترتیب به جهات مختلف تابانیده میشود و بازتابش متناظر از هر کدام، با استفاده از آشکارساز آشکارسازی میشود. همچنین یک منبع لیزر پالسی که برای چشم ایمن باشد نیز باید مورد استفاده قرار بگیرد. لیزر باید این قابلیت را داشته باشد که یک فرد پیاده که در فاصله ۱۰۰ متری لباس تیره پوشیده است را آشکارسازی کند، بتواند در دمای ۴۰- تا ۸۵ درجه سانتیگراد کار کند و همچنین پالس مناسب برای اندازه گیری فاصله با دقت ۱۰ سانتی متر را تابش کند.
با این وجود که منابع لیداری زیادی بر پایه لیزرهای دیودی موجود هستند، لیزرهای فیبری بدون نیاز به خنک سازی نیز مزایای زیادی شامل قابلیت تقسیم شدن توانهای بالای باریکه و فرستاده شدن به چندین موقعیت مکانی سنسور با استفاده از فیبر را نسبت به لیزرهای دیودی پالسی ارائه میدهند (شکل ۲). با استفاده از یک تقویت کننده توان نوسان ساز اصلی[۸] (MOPA)، میتوان به یک لیزر فیبری لیدار در طول موج ۱۵۵۰ نانومتر و نرخ تکرار از ۵ تا ۲۵۰ کیلوهرتز در سطوح توان به ترتیب از ۲۰۰ تا ۳۰۰ وات دست یافت.
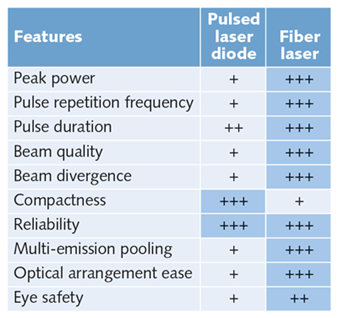
شکل ۲- منابع لیزر دیودی پالسی و لیزر فیبری که برای کاربردهای لیداری خودروهای بدون سرنشین مقایسه شده اند.
لیزر دیود پالسی اختصاص داده شده به خودرو بدون سرنشین، به صورت هیبریدی[۹] است. یک چیپ لیزر با خازن هایی که بوسیله یک ترانزیستور ماسفت، راه اندازی میشوند کار میکند. هر زمان که گیت ترانزیستور باز شود، بار الکتریکی جمع شده در خازنها روی چیپ تخلیه میشود و باعث میشود که پالس اپتیکی ساطع شود. این نوع منابع مقرون به صرفه تر هستند زیرا خروجی ۹۰۵ نانومتری آنها به راحتی با آشکارسازهای سیلیکانی نسبت به فوتودیودهای گران قیمت InGaAs ۱۵۵۰ نانومتری آشکارسازی میشوند. اما این لیزر دیودها محدودیت نرخ تکرار و پایین بودن قله توان و گرم شدن بیش از حد دارند.
منابع لیزر دیود برای لیدار نوع فلش سه بعدی بر اساس تکنولوژی دیود استک[۱۰] است. این نوع لیزر دیودی دارای چندین بار گسیلنده از لبه در یک استک عمودی است و برای جلوگیری از گرم شدن بیش از حد داخل هر لایه با یک هیت سینک نازک جدا شده است. متأسفانه غیر همدوس بودن این استکها باعث شده است که توان خروجی بالای آنها شرط قرارگیری در کلاس ۱ و بی خطر بودن برای چشم را از بین ببرد. علی رغم اینکه لیزرهای با کاواک عمودی که از سطح تابش میکنند[۱۱] (VCSELها) یک جایگزین مقرون به صرفه تر نسبت به استکها هستند، توان خروجی ضعیف تر آنها، استفاده از آنها را محدود به کاربردهای TOFبا فاصله کوتاه میکند.
لیدار نقشه بردار از پوشش جنگل
محققین مرکز علوم و تکنولوژی فضایی لوول[۱۲] در دانشگاه ماساچوست و دیگر همکارانشان در مرکز بوستون، یک سیستم کاوش جدید لیزری لیدار زمینی را تولید و مورد آزمایش قرار داده اند. هدف این سیستم ثبت و بدست آوردن ساختار سه بعدی پوشش گیاهی جنگل ( شکل ۳) است.
این لیدار اکیدنای دو طول موجی[۱۳] (DWEL)، با استفاده از بازتابشهای اختلافی از پوششهای جنگلی که برگرفته شده از دو دسته پالسهای همزمان لیزری، یکی در ناحیه مادون قرمز با موج کوتاه (SWIR) و دیگری در ناحیه مادون قرمز نزدیک، ساختار جنگل را با متمایز کردن برگها از تنه در یک دقت زاویه ای ۱ میلی رادیان مشخصه یابی میکند [۲ و ۳].
سیستم کاوش لیزری اکیدنا (DWEL) که توسط مرکز تحقیقات علمی و صنعتی استرالیا (CSIRO) نیز ثبت اختراع شده است، از یک آینه اسکن با چرخش عمودی سریع و یک سکوی اسکن با چرخش افقی آهسته تشکیل شده است که به همراه یک باریکه موازی شده ۶ میلیمتری با واگرایی ۱٫۲۵، ۲٫۵ یا ۵ میلی رادیانی برای پوشش سه بعدی اسکن فضایی استفاده میشود. میدان دید بدست آمده دارای زاویه دید چرخشی ۳۶۰ درجه ای و زاویه سمتی قائم ۱۱۷± درجه ای است. این میدان دید در واقع میتواند یک نیمکره کامل را بوجود آورد.
منابع لیزر دیود برای لیدار نوع فلش سه بعدی بر اساس تکنولوژی دیود استک[۱۰] است. این نوع لیزر دیودی دارای چندین بار گسیلنده از لبه در یک استک عمودی است و برای جلوگیری از گرم شدن بیش از حد داخل هر لایه با یک هیت سینک نازک جدا شده است. متأسفانه غیر همدوس بودن این استکها باعث شده است که توان خروجی بالای آنها شرط قرارگیری در کلاس ۱ و بی خطر بودن برای چشم را از بین ببرد. علی رغم اینکه لیزرهای با کاواک عمودی که از سطح تابش میکنند[۱۱] (VCSELها) یک جایگزین مقرون به صرفه تر نسبت به استکها هستند، توان خروجی ضعیف تر آنها، استفاده از آنها را محدود به کاربردهای TOFبا فاصله کوتاه میکند.
لیدار نقشه بردار از پوشش جنگل
محققین مرکز علوم و تکنولوژی فضایی لوول[۱۲] در دانشگاه ماساچوست و دیگر همکارانشان در مرکز بوستون، یک سیستم کاوش جدید لیزری لیدار زمینی را تولید و مورد آزمایش قرار داده اند. هدف این سیستم ثبت و بدست آوردن ساختار سه بعدی پوشش گیاهی جنگل ( شکل ۳) است.
این لیدار اکیدنای دو طول موجی[۱۳] (DWEL)، با استفاده از بازتابشهای اختلافی از پوششهای جنگلی که برگرفته شده از دو دسته پالسهای همزمان لیزری، یکی در ناحیه مادون قرمز با موج کوتاه (SWIR) و دیگری در ناحیه مادون قرمز نزدیک، ساختار جنگل را با متمایز کردن برگها از تنه در یک دقت زاویه ای ۱ میلی رادیان مشخصه یابی میکند [۲ و ۳].
سیستم کاوش لیزری اکیدنا (DWEL) که توسط مرکز تحقیقات علمی و صنعتی استرالیا (CSIRO) نیز ثبت اختراع شده است، از یک آینه اسکن با چرخش عمودی سریع و یک سکوی اسکن با چرخش افقی آهسته تشکیل شده است که به همراه یک باریکه موازی شده ۶ میلیمتری با واگرایی ۱٫۲۵، ۲٫۵ یا ۵ میلی رادیانی برای پوشش سه بعدی اسکن فضایی استفاده میشود. میدان دید بدست آمده دارای زاویه دید چرخشی ۳۶۰ درجه ای و زاویه سمتی قائم ۱۱۷± درجه ای است. این میدان دید در واقع میتواند یک نیمکره کامل را بوجود آورد.
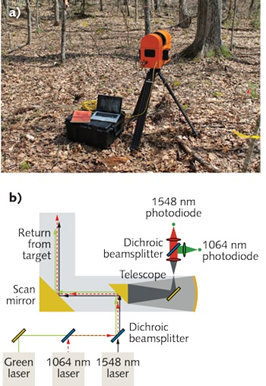
شکل ۳- a) سیستم لیدار DWEL در حال کار در جنگل هاروارد در پترشام[۱۴]. b) سیستم شامل تمام قطعات اپتیکی و الکترواپتیکی مورد نیاز است که در جعبه نارنجی رنگ قرار گرفته شده اند. لپ تاپ تمام داده ها را پردازش میکند (برگرفته شده از دانشگاه ماساچوست مرکز لوول و مرکز بوستون).
با گنجاندن یک لیزر سبز به سیستم که کاربر بتواند جهت باریکه را تشخیص دهد، DWEL میتواند ساختار پوشش گیاهی را برای کاربردهای محیطی مشخصه یابی کند. این کار با استفاده از این اصل است که برگها و دیگر قسمتهای موجود در جنگل که حاوی آب هستند در SWIR (۱۵۴۸ نانومتر) نسبت به IR نزدیک (۱۰۶۴ نانومتر) بیشتر جذب میشوند که این باعث میشود بازگشت سیگنالها از برگها به نسبت تنه، شاخه ها و دیگر قسمتهایی در جنگل که حاوی آب نیستند، متمایز شود (شکل ۴).

شکل ۴- a) تصویر دریافتی از سیستم DWEL در کانال ۱۵۴۸ نانومتر و b) همین تصویر در کانال ۱۰۶۴ نانومتر.
در این موارد برای اینکه بتوان جزئیات شکل پالس برگشتی را تا ۲ گیگاهرتز دیجیتالی کرد به پهنای پالسهای لیزری (FWHM) در حدود ۵ نانوثانیه نیاز است. یک تصویربرداری با میدان دید کامل، چندین هدف به فاصله ۱۰۰ متری از پویشگر را میتواند آشکارسازی کند. یک سیگنال به نویز خوب در حالیکه معیارهای ایمنی چشم نیز حفظ شود در انرژی پالس حدود ۰٫۶ میکروژول بدست می آید. برای کالیبراسیون سیستم از یک هدف لامبرتین تیره درون یک محفظه استفاده میشود. سیگنالهای برگشتی بوسیله یک تلسکوپ نیوتونی با قطر ۱۰ سانتی متر جمع میشوند بعلاوه باریکه های با رنگهای مختلف جدا میشوند و طول موج های خارج از باند نیز بوسیله فیلترهای تیز نوار گذر حذف میشوند. سیگنالهای هر لیزر بوسیله یک جفت آشکارساز و تقویت کننده از نوع فوتودیودهای InGaAs آشکارسازی میشوند.
مزیت DWEL بر اکثر سیستمهای لیدار دیگر توانایی متمایز کردن دو طول موج در پوشش گیاهی است بدین ترتیب، برگ ها که حاوی رطوبت بیشتری نسبت به قسمتهای چوبی هستند، در کانال ۱۵۴۸ به نسبت کانال ۱۰۶۴ تیره تر به چشم می آیند. همانطور که مشاهده میشود در کاربردهای مختلف لیدار، برای برآورده کردن نیازهای خاص، لیزر تأثیر گذار است.
References
۱٫ See https://goo.gl/Fs4VDH.
۲٫ E. S. Douglas et al., IEEE Geosci. Remote Sens. Mag. (۲۰۱۵); doi:10.1109/LGRS.2014.2361812.
۳٫ G. A. Howe et al., J. Appl. Remote Sens., 9, ۰۹۵۹۷۹ (۲۰۱۵).
Source: http://www.laserfocusworld.com/articles/print/volume-53/issue-03/features/lasers-for-lidar-application-parameters-dictate-laser-source-selection-in-lidar-systems.html
[۱] Aerosol Multiwavelength Polarization Lidar Experiment
[۲] Microelectromechanical Systems
[۳] Bright Solutions
[۴] Bathymetry
[۵] ۳D Flash Lidar
[۶] Scanning Lidar
[۷] Time-of-Flight
[۸] Master Oscillator Power Amplifier
[۹] Hybrid
[۱۰] Diode stack
[۱۱] Vertical-Cavity Surface-Emitting Lasers
[۱۲] Lowell Center for Space Science and Technology
[۱۳] Dual-Wavelength Echidna Lidar
[۱۴] Harvard Forest in Petersham